Annotation format
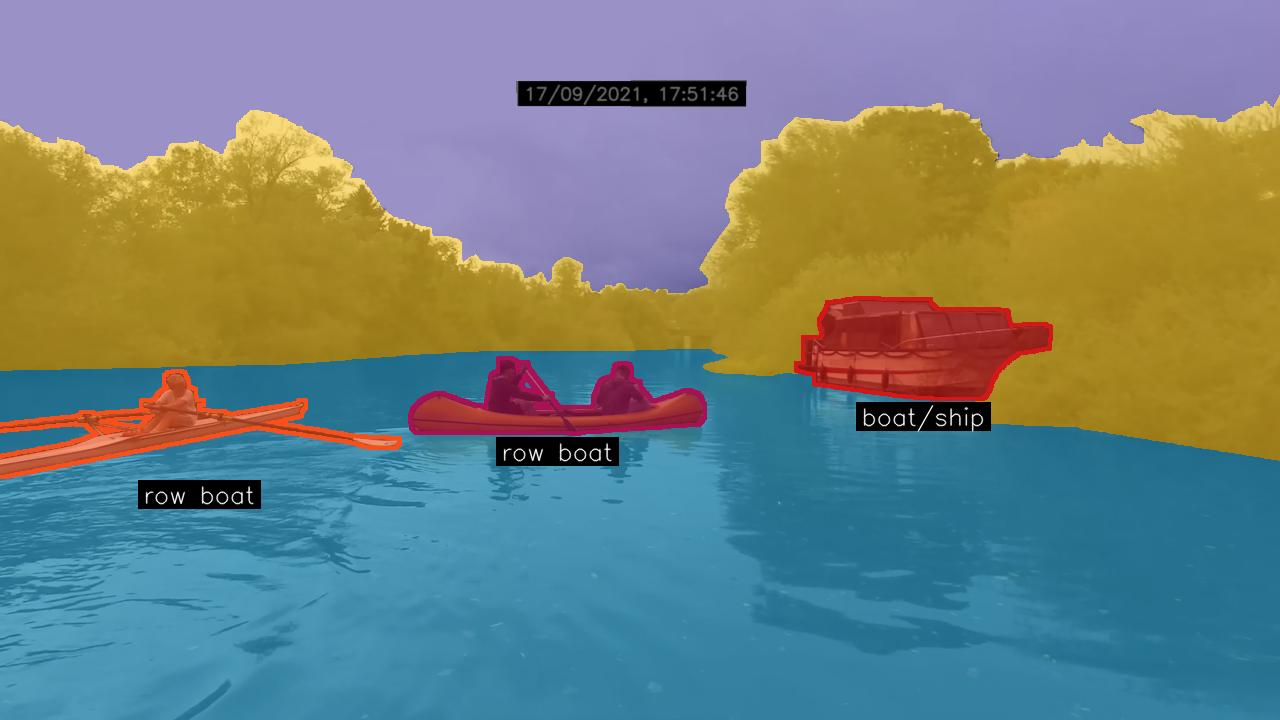
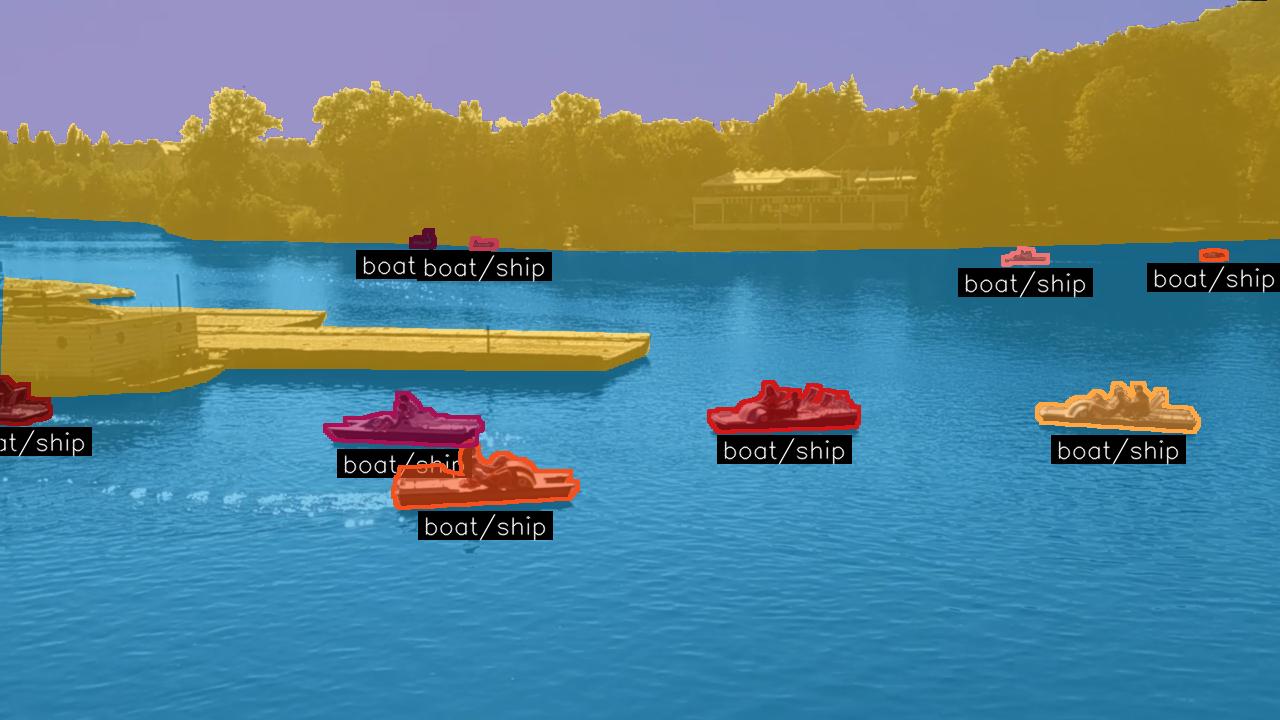
LaRS dataset comes with three types of annotations: panoptic, semantic and scene attributes.
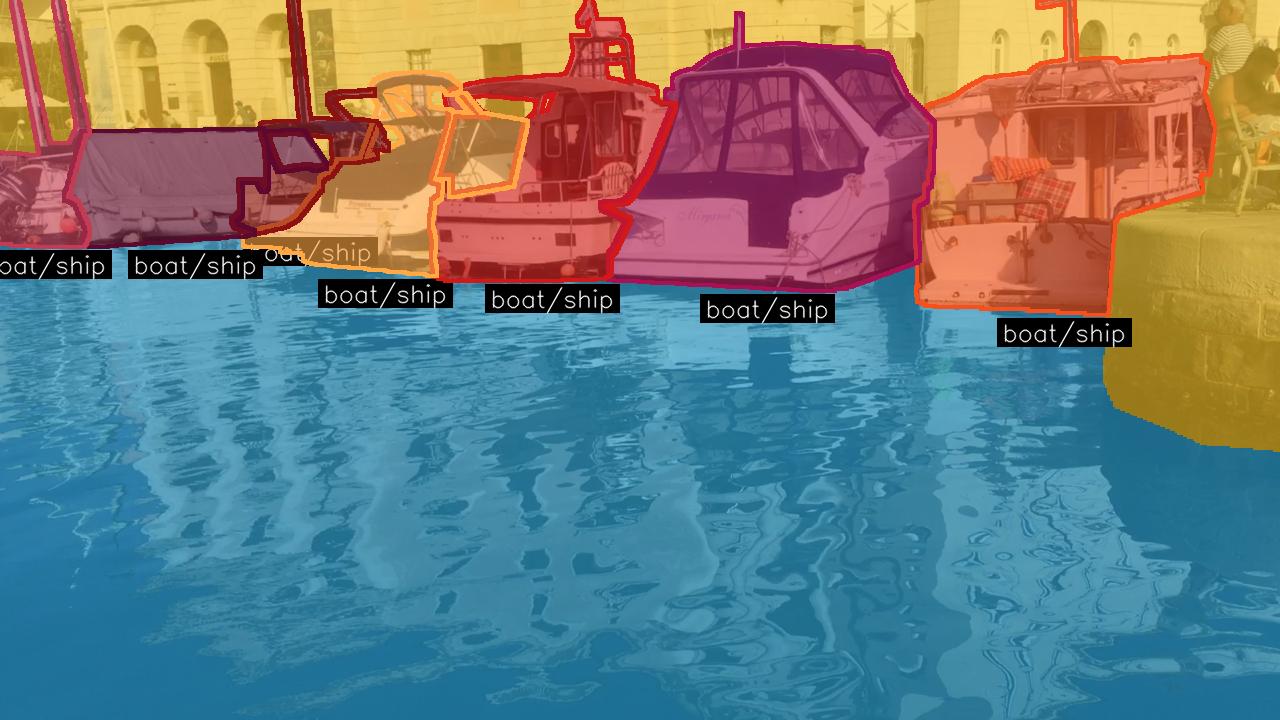
Panoptic annotations are provided in COCO format and include the panoptic_annotations.json annotation file and masks in the panoptic_masks directory.
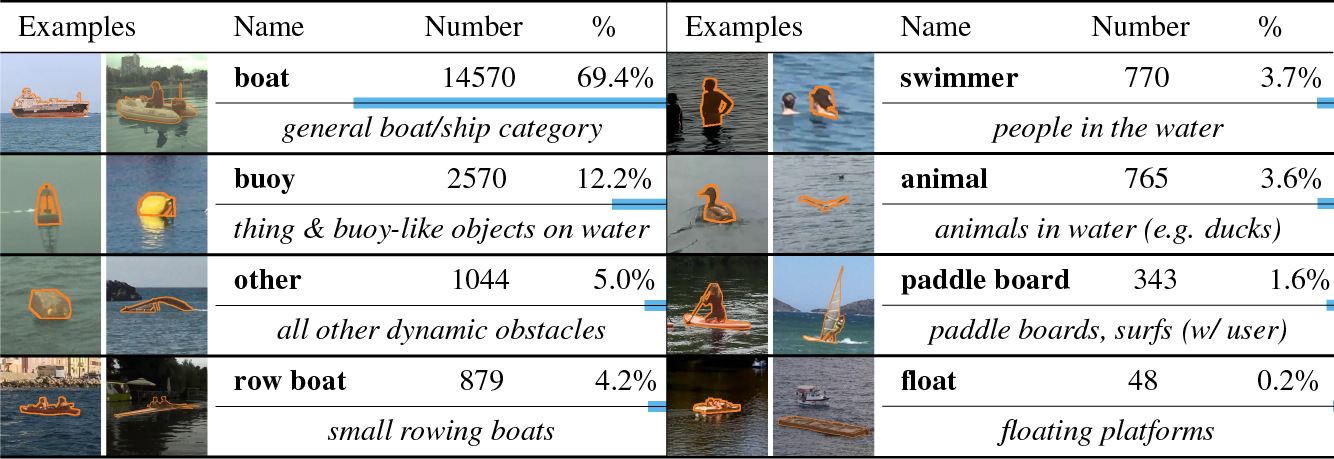
Categories and their IDs are defined in the categories field of the annotation file and are as follows:
| ID |
Name |
Type |
Supercategory |
| 1 |
Static Obstacle |
Stuff |
obstacle |
| 3 |
Water |
Stuff |
water |
| 5 |
Sky |
Stuff |
sky |
| 11 |
Boat/ship |
Thing |
obstacle |
| 12 |
Row boats |
Thing |
obstacle |
| 13 |
Paddle board |
Thing |
obstacle |
| 14 |
Buoy |
Thing |
obstacle |
| 15 |
Swimmer |
Thing |
obstacle |
| 16 |
Animal |
Thing |
obstacle |
| 17 |
Float |
Thing |
obstacle |
| 19 |
Other |
Thing |
obstacle |
Semantic annotations are provided as PNG masks in the semantic_masks directory.
Semantic annotations are pixel-wise labels of 3 classes, obstacles, water and sky as defined by the supercategories of the panoptic categories. We use the following label IDs in the PNG files:
| ID |
Category |
| 0 |
Obstacles |
| 1 |
Water |
| 2 |
Sky |
| 255 |
Ignore |
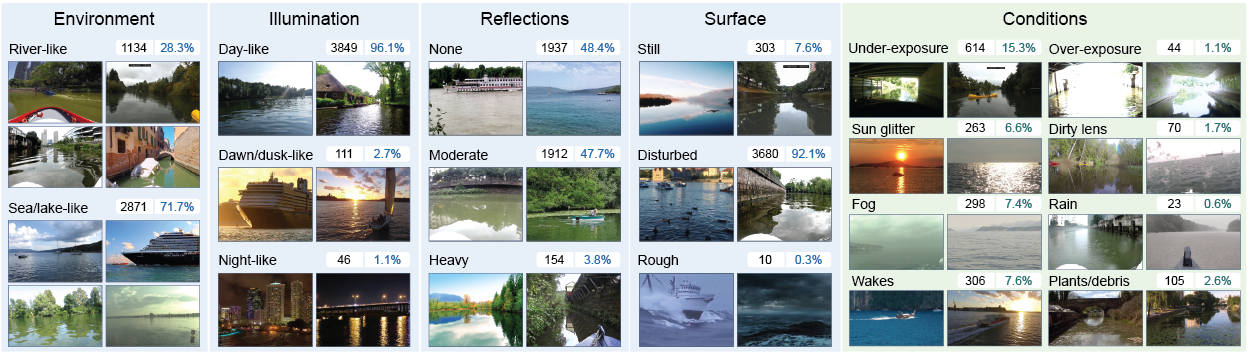
Scene attributes are stored in the image_annotations.json file.
BibTeX
If you use this dataset, please cite our work:
@InProceedings{Zust2023LaRS,
title={LaRS: A Diverse Panoptic Maritime Obstacle Detection Dataset and Benchmark},
author={{\v{Z}}ust, Lojze and Per{\v{s}}, Janez and Kristan, Matej},
booktitle={International Conference on Computer Vision (ICCV)},
year={2023}
}